![]()
"YPS" der Einplatinen-NiTinol-Roboter:
Dieser Roboter entstand im Rahmen meiner Diplomarbeit, mit dem Ziel,
einen autonomen Roboter mit NiTinol Aktoren und 2 Freiheitsgraden pro Bein
zu verwirklichen. Da der zu
verwendend e NiTinol Draht nur geringe Zugkräfte
zu Verfügung stellt, mußte von Anfang an eine leichte und dennoch
stabile Bauweise angestrebt werden. Erste Versuche mit einer konventionellen
Scharnierlösung brachten keinen Erfolg. Aufgrund der Reibung im
Scharnier wurde die Kraft nicht effizient genug umgesetzt und das Kippmoment
durch die Krafteinleitung verursachte ein stocken der Schwenkbewegung.
e NiTinol Draht nur geringe Zugkräfte
zu Verfügung stellt, mußte von Anfang an eine leichte und dennoch
stabile Bauweise angestrebt werden. Erste Versuche mit einer konventionellen
Scharnierlösung brachten keinen Erfolg. Aufgrund der Reibung im
Scharnier wurde die Kraft nicht effizient genug umgesetzt und das Kippmoment
durch die Krafteinleitung verursachte ein stocken der Schwenkbewegung.
Es mußte eine neue Art der Anlenkung gefunden werden!
Folgendes Bild zeigt eine andere Lösung des Problems.
Bei dieser Testschaltung wurden
di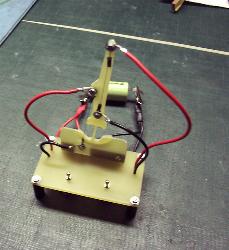 e
Materialeigenschaften von GFK ausgenutzt, um die Vorspannung der NiTinol
Aktoren herzustellen. Mit zwei kleinen Schaltern kann man den Stromfluß
durch den Heber- oder Schwenker Aktor freigeben. In Versuchen fiel auf, daß
die Wärmeabgabe der Drähte unter leichtem pusten steigt und so
eine schneller Zyklenfolge erreicht werden kann. Allerdings muß
dann auch der Stromfluß beim Erhitzen des Drahtes erhöht
werden.
e
Materialeigenschaften von GFK ausgenutzt, um die Vorspannung der NiTinol
Aktoren herzustellen. Mit zwei kleinen Schaltern kann man den Stromfluß
durch den Heber- oder Schwenker Aktor freigeben. In Versuchen fiel auf, daß
die Wärmeabgabe der Drähte unter leichtem pusten steigt und so
eine schneller Zyklenfolge erreicht werden kann. Allerdings muß
dann auch der Stromfluß beim Erhitzen des Drahtes erhöht
werden.
Aufgrund der gesammelten Erfahrungen mit der Testschaltung wurde eine
sechsbeinige Mechanik (Typ2)
 entworfen
und gebaut. Um diese auf ihre Tauglichkeit zu prüfen, mußte jedoch
eine passende Elektronik entworfen werden. Zunächst erfolgte nur eine
Integration der Treibertransistoren (L 293 D von SGS Thompson). Hierbei wurde
eine Vereinfachung gemacht, die für jeden sechsbeinigen Roboter gilt;
Die äußeren Beinpaare einer Seite bewegen sich immer synchron
zueinander! Daher kommt man mit Anstatt 12 Transistorausgängen
(6Beine*2Freiheitsgrade=12Aktoren) auf nur 8 zu steuernden Ausgängen.
Hierbei wird auch die Hebefunktion für die Beinpaare zusammen gefaßt.
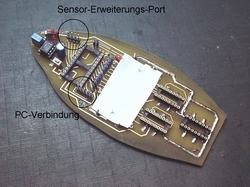
Nebenstehend ein Bild der Elektronik v.1.
entworfen
und gebaut. Um diese auf ihre Tauglichkeit zu prüfen, mußte jedoch
eine passende Elektronik entworfen werden. Zunächst erfolgte nur eine
Integration der Treibertransistoren (L 293 D von SGS Thompson). Hierbei wurde
eine Vereinfachung gemacht, die für jeden sechsbeinigen Roboter gilt;
Die äußeren Beinpaare einer Seite bewegen sich immer synchron
zueinander! Daher kommt man mit Anstatt 12 Transistorausgängen
(6Beine*2Freiheitsgrade=12Aktoren) auf nur 8 zu steuernden Ausgängen.
Hierbei wird auch die Hebefunktion für die Beinpaare zusammen gefaßt.
Nebenstehend ein Bild der Elektronik v.1.
Das Bild unten zeigt die Elektronik auf der Typ2 Mechanik aufgesetzt. Diese
Einheit ist funktionsbereit. Um jedoch möglichst viel Gewicht zu sparen,
reifte der Plan die Mechanik und die Elektronik aus einer kupferbeschichteten
Platine zu fertigen. Da aber das Platinenmaterial bei der Herstellung
m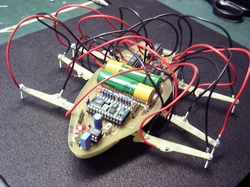 it
Tafelscheeren getrennt wird, sind die Kanten nicht rechtwinklig zueinander.
Dies ist jedoch notwendig um die zwei Bearbeitungsschritte maßhaltig
zu vollziehen. Es zeigte sich sehr schnell, daß man zuerst mechanisch
Bearbeiten mußte und dann erst die Platine belichten und ätzen
konnte. Nach langem überlegen wurde die mechanische Fertigung unter
Rotlicht vollzogen, um nicht die fotoempfindliche Schicht vorzubelichten.
Aus heutiger Sicht würde ich es wieder anders herum probieren, doch
unter Zeitdruck wählt man das Verfahren mit den besten
Realisierungschancen...
it
Tafelscheeren getrennt wird, sind die Kanten nicht rechtwinklig zueinander.
Dies ist jedoch notwendig um die zwei Bearbeitungsschritte maßhaltig
zu vollziehen. Es zeigte sich sehr schnell, daß man zuerst mechanisch
Bearbeiten mußte und dann erst die Platine belichten und ätzen
konnte. Nach langem überlegen wurde die mechanische Fertigung unter
Rotlicht vollzogen, um nicht die fotoempfindliche Schicht vorzubelichten.
Aus heutiger Sicht würde ich es wieder anders herum probieren, doch
unter Zeitdruck wählt man das Verfahren mit den besten
Realisierungschancen...
Hier also mal der fertige Typ3 Roboter vorm Oszilloskop. Die Sensoren
si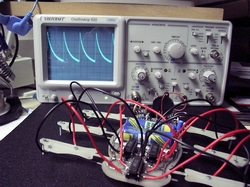 nd integriert und die IR-Dioden werden gerade auf
die Sendefrequenz hin überprüft. Gut zu sehen sind die Sendepeaks
und die langsam abfallende Flanke.
nd integriert und die IR-Dioden werden gerade auf
die Sendefrequenz hin überprüft. Gut zu sehen sind die Sendepeaks
und die langsam abfallende Flanke.
Zu den IR Sensoren hat der fertige Typ3 ("YPS") Roboter auch noch 2
lichtempfindliche Widerstände bekommen, so daß einfache
Verhaltensweisen von Insekten nachgeahmt werden können (Lichtverfolgung
oder -meidung!).
Ein Spannungssensor mißt die Akkuspannung und regelt die
Leistungs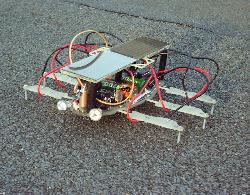 anpassung für die Aktoren, da diese bei vollen
Akkus ohne Anpassung zu heiß werden würden. Positiver Nebeneffekt
der Regelung ist eine Adaption an verschiedene Drahtdurchmesser und damit
verbunden auch andere Strömstärken. Die Impulsbreitenmodulierung
wird von der STAMP2 ausgerechnet und an die Leistungstransistoren per TTL
Pegel übertragen.
anpassung für die Aktoren, da diese bei vollen
Akkus ohne Anpassung zu heiß werden würden. Positiver Nebeneffekt
der Regelung ist eine Adaption an verschiedene Drahtdurchmesser und damit
verbunden auch andere Strömstärken. Die Impulsbreitenmodulierung
wird von der STAMP2 ausgerechnet und an die Leistungstransistoren per TTL
Pegel übertragen.
Das nebenstehende Bild zeigt den fertigen Leichtroboter "YPS" mit aufgebauten
Solarzellen zum Laden der Akkus. Damit kann der Aktionsradius bei sonnigem
Wetter erweitert werden.
Lego Mindstorms:
 Bisher
habe ich einige "normale" Lego Roboter mit Kettenantrieb gebaut.
Laufroboter sollen aber noch folgen. Um die Begrenzung von 3 Sensoren
zu umgehen, plane ich ein Widerstandsnetzwerk einzusetzen. Anstelle der Taster
sollen demnächst auch IR-Sensoren verwendet werden- übrigens die
gleichen, die in "YPS" zum Einsatz kommen!
Bisher
habe ich einige "normale" Lego Roboter mit Kettenantrieb gebaut.
Laufroboter sollen aber noch folgen. Um die Begrenzung von 3 Sensoren
zu umgehen, plane ich ein Widerstandsnetzwerk einzusetzen. Anstelle der Taster
sollen demnächst auch IR-Sensoren verwendet werden- übrigens die
gleichen, die in "YPS" zum Einsatz kommen!
Zur Programmierung verwende ich nicht die grafische Umgebung von Lego, sondern
NQC (Not quite C) von Dave Baum. Man kann damit alle Möglichkeiten
ausschöpfen, die der RCX Block bietet- zudem ist NQC kostenlos.
Geplante Roboter
Projekte:
Hier stelle ich neue Roboter Projekte vor, die auch online zu bestellen sein
werden. Zur Zeit arbeite ich an einem sechsbeinigen Laufroboter mit
Servoantrieben aus dem Modellbau. Er wird die Basic STAMP2 als Prozessor
besitzen und in etwa die Größe einer CD-Hülle erreichen...
demnächst mehr :o).
CNC Fräsmaschine:
Alle bisherigen Projekte sind auf einer CNC gesteuerten Fräsmaschine
erstellt worden- der KOSY2 der Firma
MAX Computer GmbH,
Schömberg. Diese PC gesteuerte Fräsmaschine in
Portalbauweise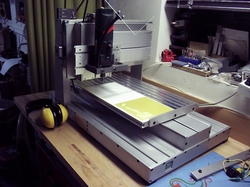 hat einen verfahrbaren Y-Tisch mit den Verfahrwegen
350mm*500mm*108mm. Die maximale Vorschubgeschwindigkeit liegt im Eingriff
bei ca. 25 mm/sec (1,5 m/min). Die Spindeldrehzahlen reichen von 7000 U/min
bis zu 27.000 U/min und decken damit den ganzen Bereich an bearbeitbaren
Werkstoffen für den Roboterbau ab. Es wurden bisher MDF Hölzer,
verschiedene (weiche) Kunststoffe wie ABS, Faserverbundwerkstoffe wie GFK/CFK
und Aluminumlegierungen erfolgreich bearbeitet.
hat einen verfahrbaren Y-Tisch mit den Verfahrwegen
350mm*500mm*108mm. Die maximale Vorschubgeschwindigkeit liegt im Eingriff
bei ca. 25 mm/sec (1,5 m/min). Die Spindeldrehzahlen reichen von 7000 U/min
bis zu 27.000 U/min und decken damit den ganzen Bereich an bearbeitbaren
Werkstoffen für den Roboterbau ab. Es wurden bisher MDF Hölzer,
verschiedene (weiche) Kunststoffe wie ABS, Faserverbundwerkstoffe wie GFK/CFK
und Aluminumlegierungen erfolgreich bearbeitet.
Ätzmaschine:
Obwohl die oben genannte Fräsmaschine auch das Isolierfräsen
beherrscht,
hab e ich mir für sehr feine Leiternbahnen
ein konventionelles Ätzbad der Firma
ISEL,
Eiterfeld zugelegt. Die Ätzmaschine Nr. 1 kann Platinen bis zu 250mm*175mm
zuverlässig ätzen. Es sind eine regelbare Heizung und eine
Umwälzpumpe integriert. Als Ätzmedium wird Natriumpersulfat verwendet,
die damit ermittelten Ätzzeiten liegen je nach Alterungszustand der
Flüssigkeit und Platinengröße bzw. dicke zwischen 7 und 10
Minuten.
e ich mir für sehr feine Leiternbahnen
ein konventionelles Ätzbad der Firma
ISEL,
Eiterfeld zugelegt. Die Ätzmaschine Nr. 1 kann Platinen bis zu 250mm*175mm
zuverlässig ätzen. Es sind eine regelbare Heizung und eine
Umwälzpumpe integriert. Als Ätzmedium wird Natriumpersulfat verwendet,
die damit ermittelten Ätzzeiten liegen je nach Alterungszustand der
Flüssigkeit und Platinengröße bzw. dicke zwischen 7 und 10
Minuten.
|